Features:
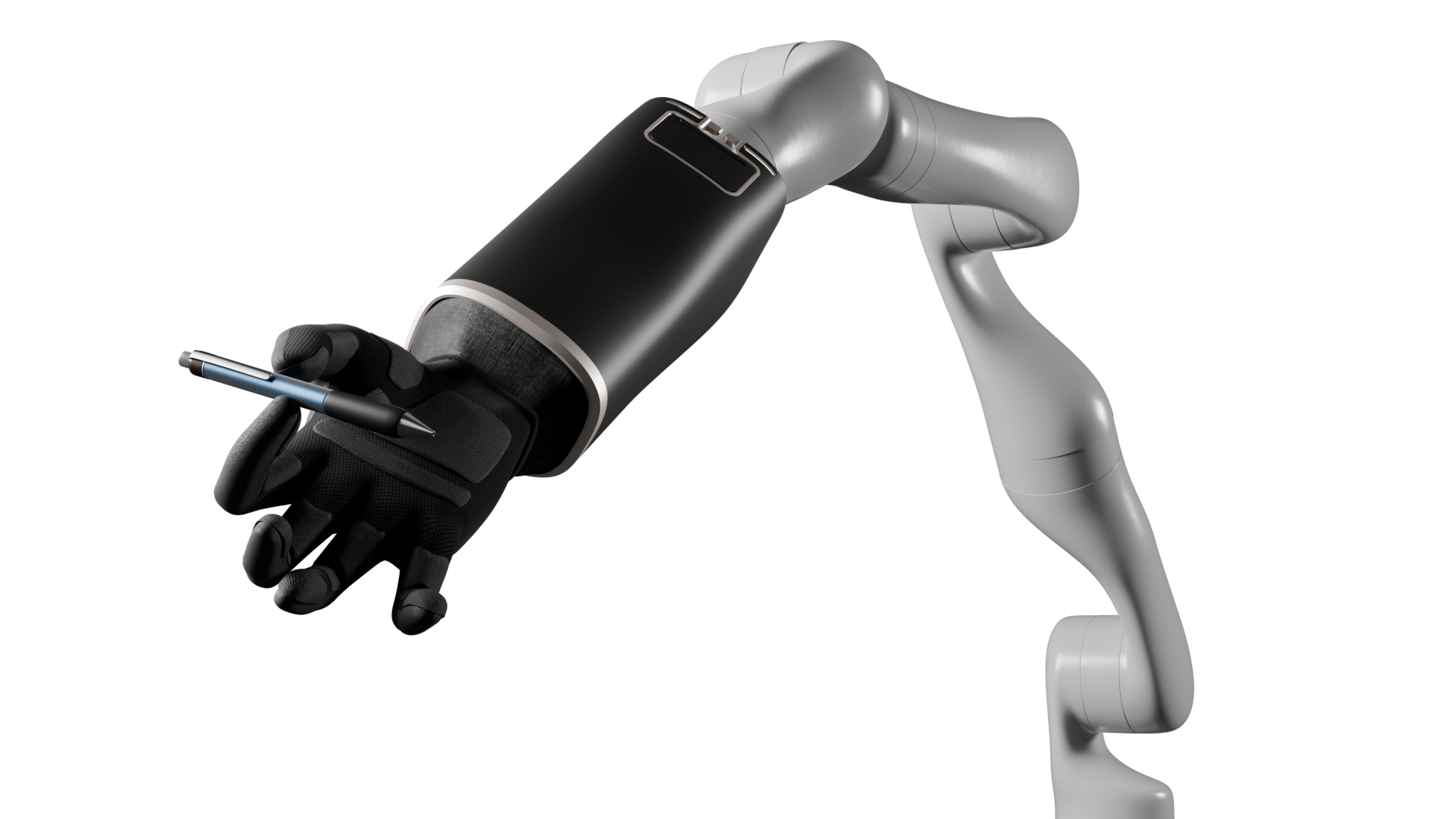
- 20DOF Dexterous Hand
- 2DOF Wrist joint
- Tendon Driven
OVERVIEW:
Dexterous manipulation remains one of the primary challenges in humanoid robotics. While advances in locomotion and perception have enabled robots to navigate complex environments, interacting with the physical world still requires human-level hand functionality. A capable robotic hand must combine dexterity, force control, and rich sensory feedback to perform everyday tasks ranging from precision grasping to tool use.
This hand was developed as a manipulation and data-collection platform for embodied AI systems. Featuring 20 degrees of freedom, a 2-DOF wrist, and a compact tendon-driven architecture, the hand enables human-like grasping and object interaction across a wide range of tasks. When paired with the tactile sensing glove, the system captures high-fidelity human demonstrations including finger motion and contact information, providing rich manipulation datasets


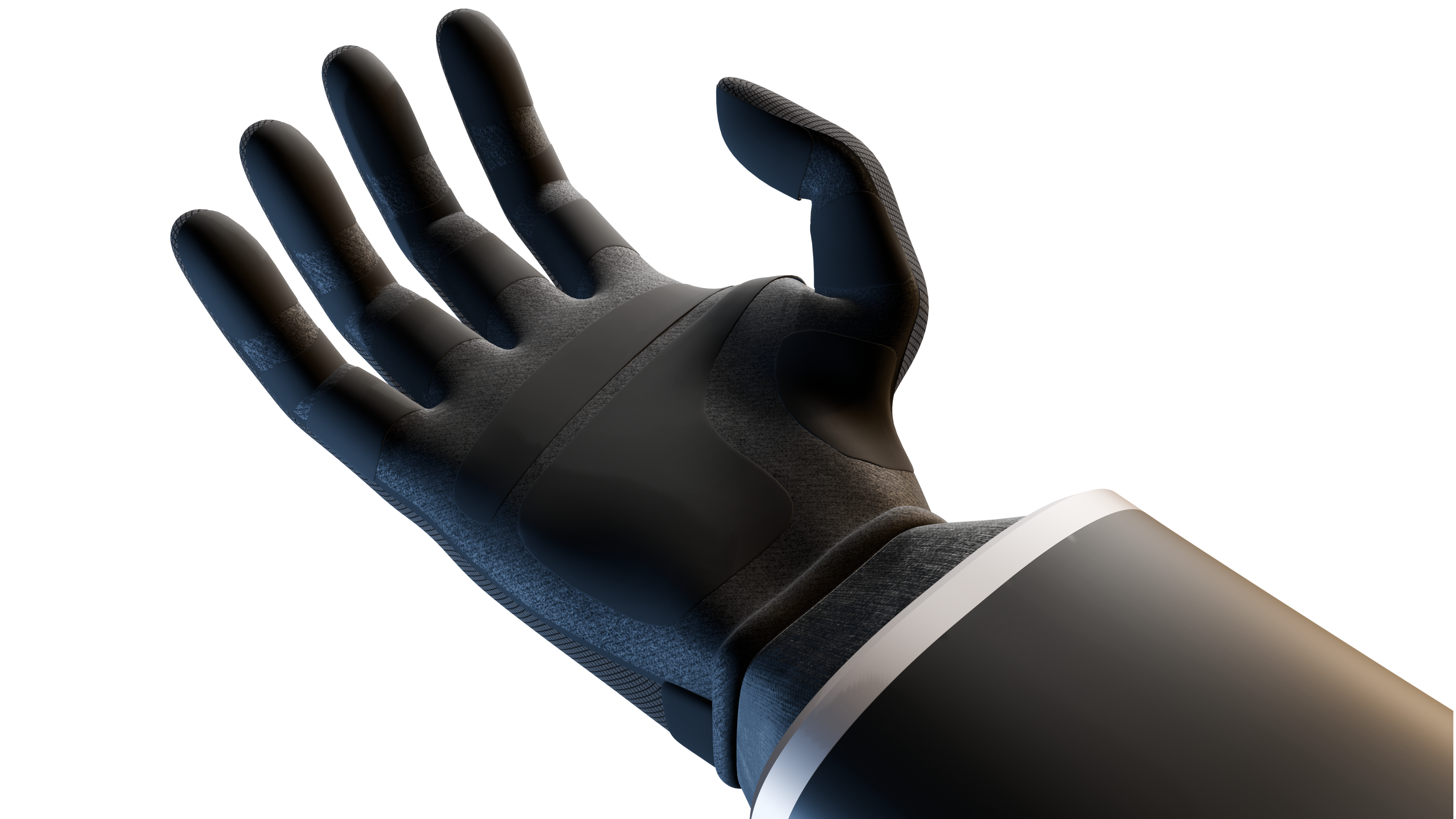
Sensor Glove Example